FearBot
ist eine Roboter-Installation. FearBot ist eine Arbeit aus meiner Werksserie der “emotionalen Roboter”.
Seit Ende der siebziger Jahre habe ich mich für Roboter, deren Technologie und deren anwendungsbezogenen Fortschritt interessiert (daher auch mein Pseudonym Symboter), seit einem Jahrzehnt arbeite ich mit ihnen nicht nur privat, sondern auch beruflich.
Mir ist dabei aufgefallen, dass die Roboter nur sehr kurze Zeit ihres Einsatzes tatsächlich ihrer geplanten Bestimmung folgen, die restliche Zeit verbringen sie in den Entwicklungs- oder Service-Laboren und werden seziert, neu konfiguriert oder mit neuer Software bestückt. Wenn ich Roboter wäre, fände ich dieses Dasein wenig erfreulich und umsomehr unangenehm, beängstigend.
Der zweite Aspekt ist das Fehlen einer wirklichen Serie von gleichartigen Robotern. Immernoch sind Roboter sehr verschieden, auch wenn sie gleichartig konstruiert wurden. Fast jeder Roboter ist also ein Unikat. Ist er schon einige Jahre alt ist er sicher ein Unikat, ähnlich wie ein Oldtimer vom Aussterben bedroht.
Der dritte Aspekt ist das Entstehen von Emotionen, Empfindungen ohne aktives Hinzutun von Programmierung dafür. Je komplexer ein Roboter ist, desto seltsamer und individueller wird sein Verhalten. Das ist eine Folge der Komplexität, ähnlich wie beim Menschen…, es entsteht der “Geist in der Maschine”, ob man das will oder nicht. Die Quantenphysik geht noch weiter: hier gibt es keinen Unterschied zwischen Geist und Materie, d.h. quantenphysikalisch betrachtet ist die Maschine der Geist.
Bei der Umsetzung haben mich vor allem das Thema “Angst” bei einem gefangenen Roboter beschäftigt und zudem wie immer bei mir: die Soundvielfalt der sirrenden Motoren, der Gelenke, des Käfigs und der Roboterlaute bei vereinzelten Ereignissen.

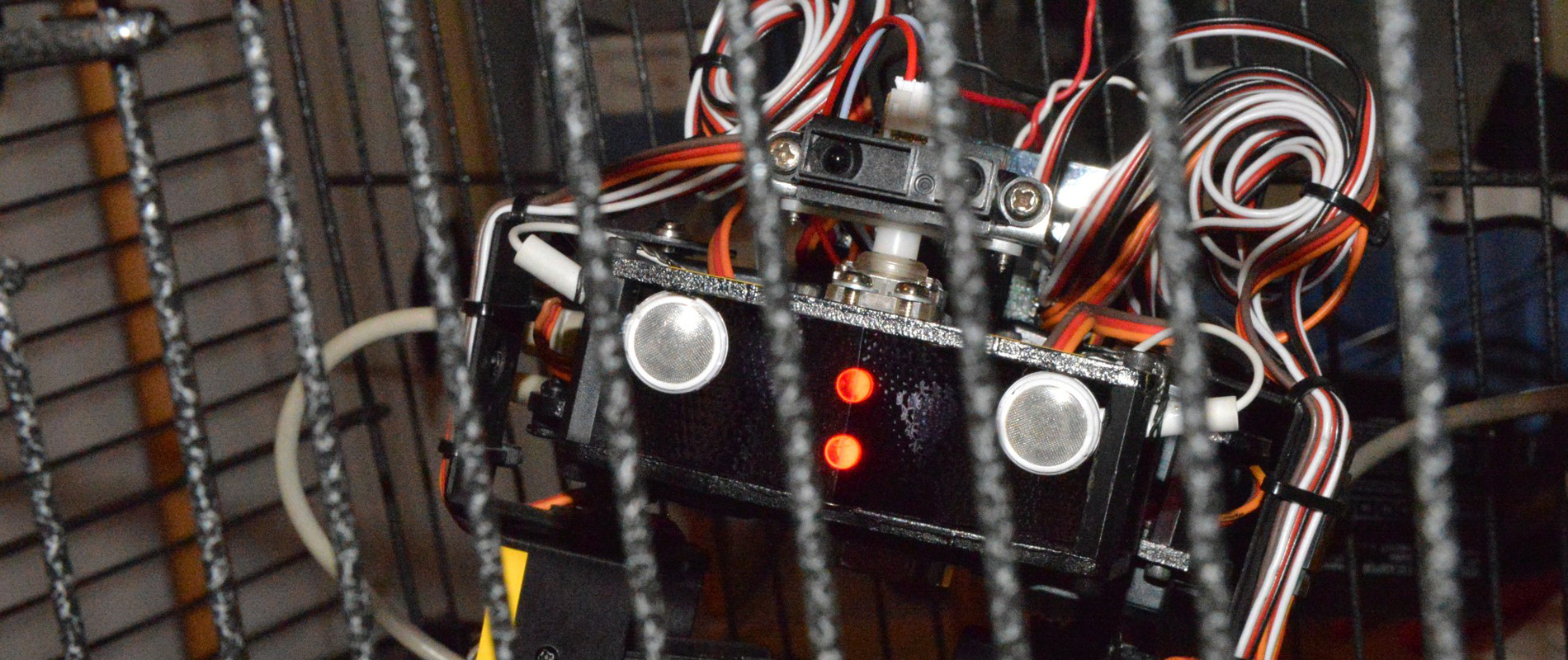
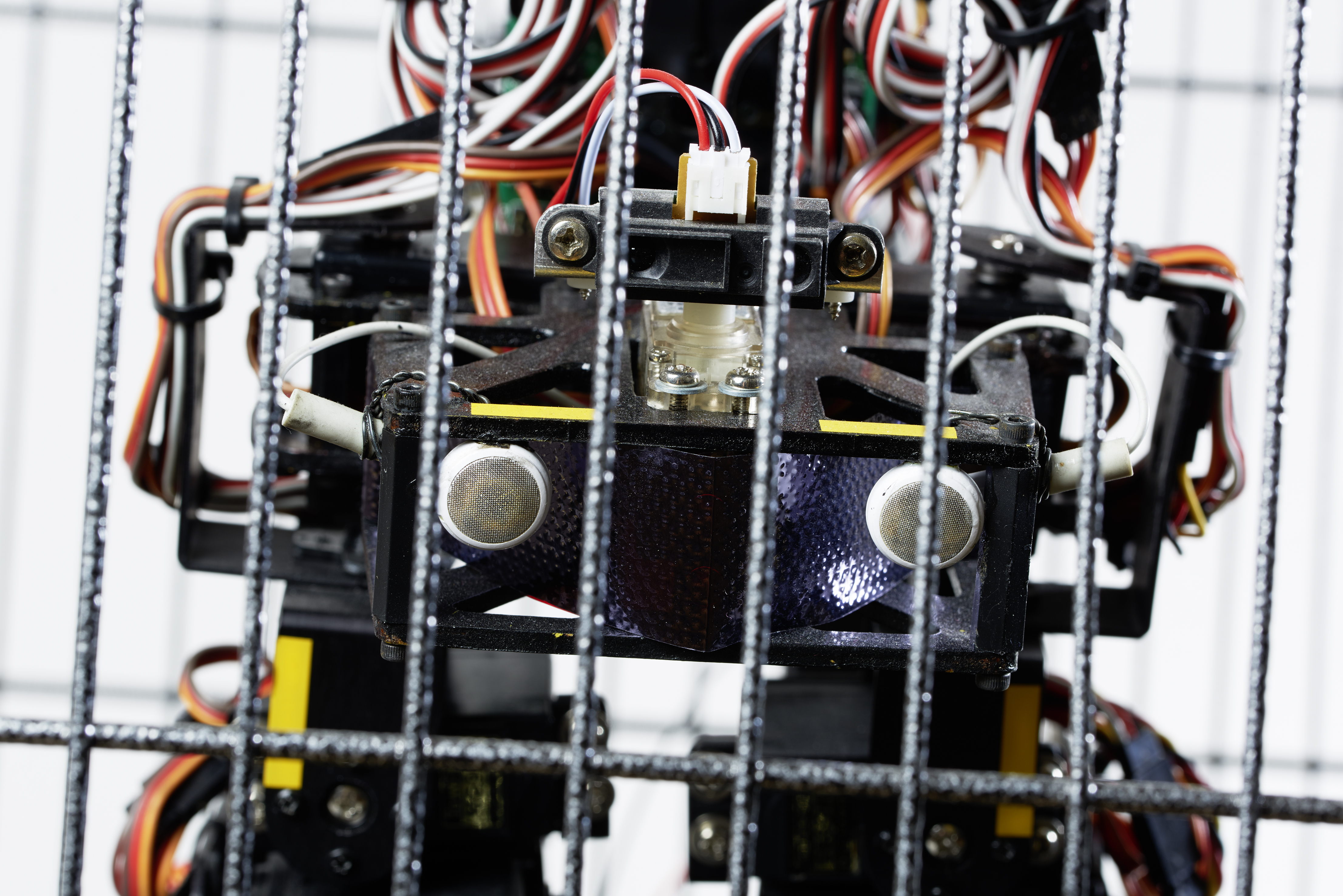
Hockender Roboter im Käfig, Schlafstellung
Ganz im Sinne von Cage ist diese Roboter-Installation wie gesagt auch ein Soundwerk, welchem eine Konzeption zugrunde liegt, aber welches auch durch den Betrachter und den Zufall beeinflusst wird. Zu diesem Zweck sind sowohl ein Sensorsystem wie auch etliche Zufallsgeneratoren in einem Regelnetzwerk angelegt.
Bewegungsereignisse
Da der Roboter mit seinem linken Fuß fest angekettet ist, kann er sich in seinem Käfig nur hin und herbewegen und das freie rechte Bein beliebig heben und nach vorne oder hinten strecken. Zudem kann der Roboter in die Hocke gehen und nach unten und nach oben sehen.Ein weiteres Bewegungsereignis ist das Hin-und Herschwenken des Objektsensors, welches in manchen Situation auftritt.
Ja nach Angststatus verharrt er länger in einer Position. Auch die Geschwindigkeit der Bewegungsausführung ist angstgesteuert. Der Auswahl der nächst folgenden Bewegung des Roboters geschieht durch ein Regelwerk und Zufallsgeneratoren.
Soundereignisse
Es ist das Sirren der Motoren,
das Scharben des Fußes über den Boden des Metallkäfigs,
die angstabhängigen eigenen Roboter-beep und -brummsounds,
das Klappern der Robotergelenke und des Käfigs beim Zittern des Roboters.
Alles recht sublim, da unverstärkt.
Physische Daten:
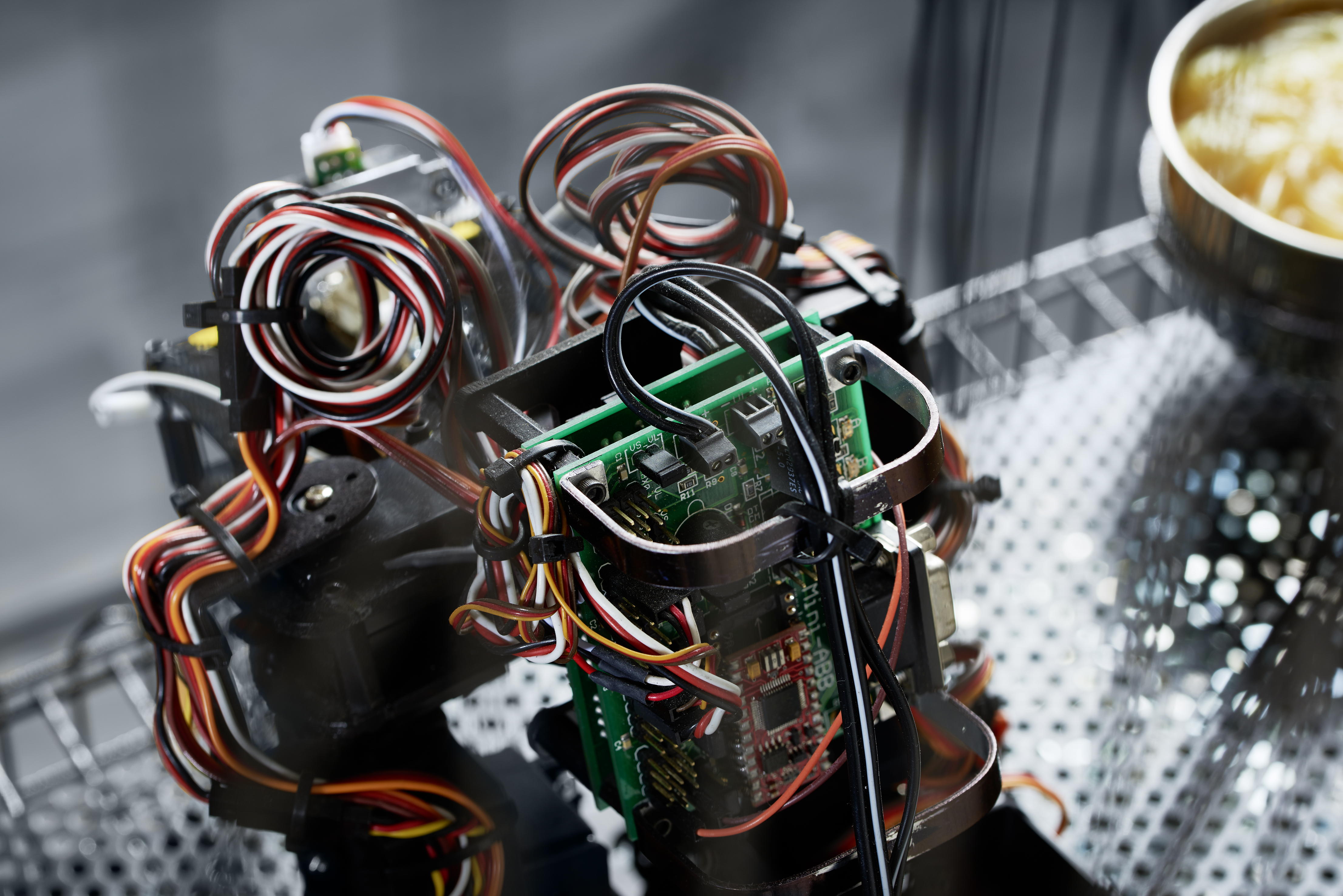
2 Prozessoren: Atmel ATMEGA168 (Kleinhirn) und BasicAtom Pro (Mittelhirn)
13 Motoren, 12 davon mit digitalem Controller und Metallgetriebe
1 Lüfter
12 Gelenke am Körper, 1 Gelenk für optisches System
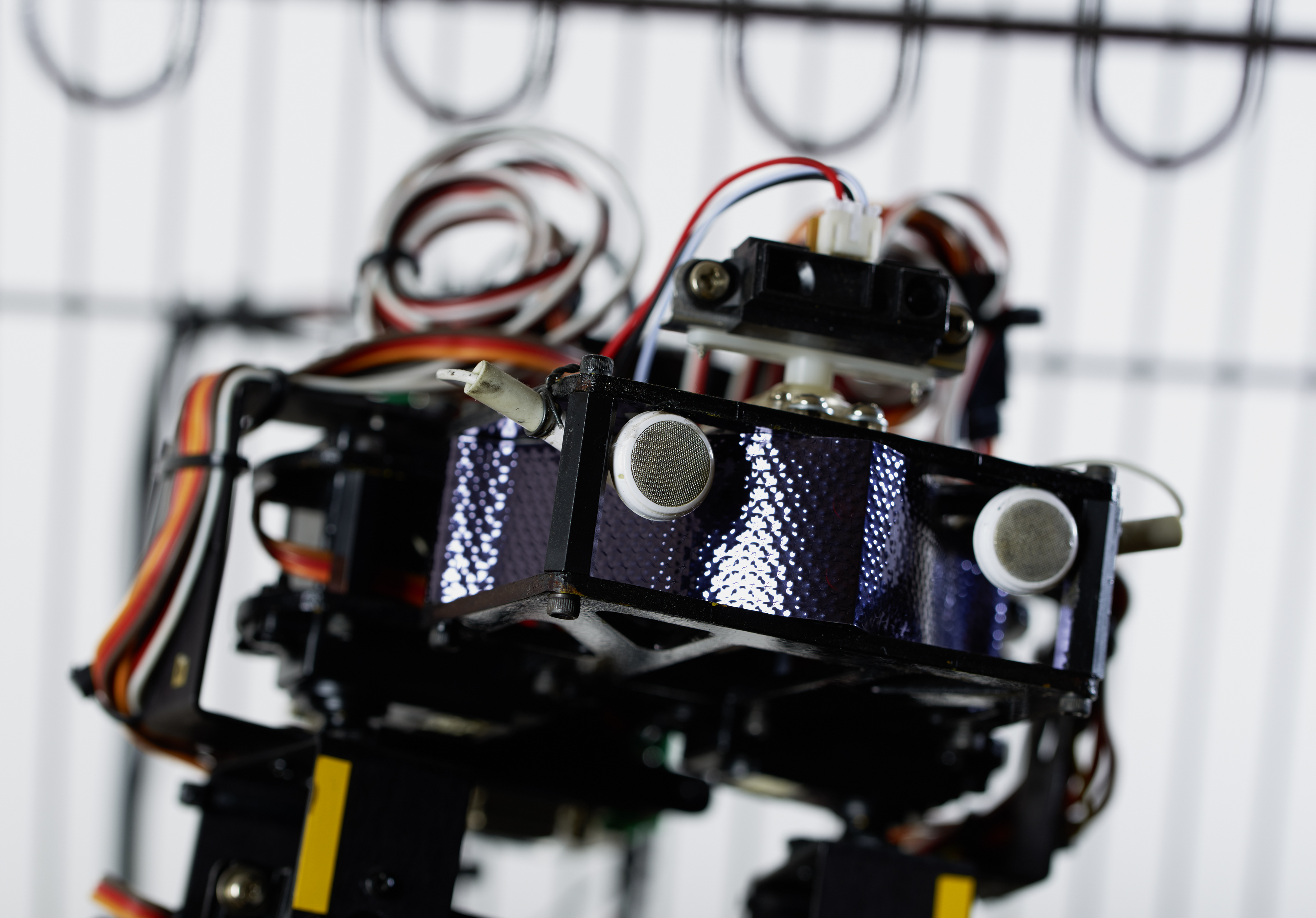
Infrarotsensor für Objekterfassung bzw Abstandserkennung
Gesichert durch Käfig auf 4 Rollen, feste Verschraubung und schwere Fußfessel.
Elektrische Daten
Stromverbrauch ca 5 Ampere bei Volllast
2 Netzteile 230V -> 12VDC (4A und 5A)
2 Stromschalter zum Aktivieren/Deaktivieren der beiden Prozessoren
1 Lüfternetzteil
Inhaltliche Daten:
zwei Gehirne, die miteinander kommunizieren, eines für die Planung und Sensorik, das andere für die Bewegungsausführung
20 Bewegungen, jede einzelne Bewegung wird über Tabellen mit anderen Bewegungen je nach Angstzustand kombiniert.
Dutzende Zufallsgeneratoren mit Angstgewichtung für
die Auswahl der nächsten Bewegung,
die Pausen zwischen Bewegungen
die Geschwindigkeit von Bewegungen
Drehung des Objektsensors
Lautäusserungen
Objektsensor zur Einleitung der Ruhephase
12 Soundartikulationen
Lichtartikulation jeder Bewegungssequenz
Bewegungssequenzen:
Der Roboter erschrickt beim Einschalten und zuckt heftig, er reagiert nicht auf jeden Einschaltvorgang.
Der Roboter verbringt seine Ruhephase in der Postition der Hocke.
Die Hocke entlastet möglichst viele Motoren, ist also für den Roboter angenehm, dennoch zittert er leicht.
Die Hockphase besteht aus drei zufällig langen Pausephasen, die erste und letzte wird durch Soundartikulationen begleitet.
Alle weiteren Bewegungen sind zufällig, bzw. angstgewichtete Bewegungen.
Ist der Roboter in einer stabilen Mittellage (Hocke, halbhohe Hocke oder aufrechter Stand) und tritt ein Gegenstand oder Hindernis ca. 2-5 cm vor seine Augen, dann sieht er nichts mehr von seiner Umgebung und der Roboter wird beruhigt. Er geht dann in die Hocke und schäft kurz. Nach dem Aufwachen streckt er sich und beginnt mit seinen zufälligen bzw. angstgesteuerten Aktionen.


Hier ein Video von willkürlichen 5 Minuten nach dem Einschalten:
FearBot (2014)
Kinetische Roboter Installation
Motoren, Elektronik, Käfig mit Schrauben, Fett, Kabelstückchen, Kette, Schloss
Gewicht mit Käfig: 12 kg
Größe: 143cm (H), 63cm (B), 45cm (T)
Unikat von 2 nicht identischen Ausführungen+1ea.
Ausstellungen:
Survivors Gruppenausstellung, Berlin, 30.05.2014
Proud Collector #2, Berlin, 02.05.2015
Art Karlsruhe, Karlsruhe 18.02.2016
Ostrale, Dresden, Juli-Oktober 2017
New York meets Berlin, Berlin, 23.06.2018
Olaf Schirm – Main Works, Guelman und Unbekannt Gallery, Berlin, 2023
I loved your blog article. Really Cool.
Faszinierend und zeitgemäß zugleich:
Ein künstliches Wesen als überlebenden Gefangenen angekettet in einem Käfig zu zeigen.
Selbst künstliche Wesen, wie der FearBot, sind der Vernichtung ausgesetzt – wie vieles auf diesem Planeten!
Ein genialer künstlerischer Einfall, der dieses technische Wunderwerk, lebendig und mit einer Seele wahrnehmbar werden lässt. Er sackt immer wieder zusammen; seine Seelenqualen werden jammervoll hörbar durch das Surren, Knacken, Scharben, Klappern.
Die qualvolle Todesangst des Roboters wird spürbar, als trüge er die Last der Welt, die er ändern möchte durch sein Eingreifen; für ihn gibt es jedoch kein Entrinnen. Er ist angekettet und eingeschlossen in seinem Käfig, der ihm leidvoll einen Blick nach außen ermöglicht, jedoch keine Flucht und kein Entrinnen zulässt. Eine dringend erforderliche Änderung für ihn, noch für die WELT wird so möglich…