
Mit TeleRobot bezeichne ich ein Projekt bei dem das Ziel ist, einen Roboter über das Internet (nicht lokal) zu steuern.
Zwar kann man einige solcher Geräte kaufen, jedoch sind sie oft geschlossene Lösungen, d.h. die Hardware ist nur schwer erweiterbar und die Software geschlossen.
Cherokey von DFRobot, diesen Bausatz verwendete ich für einen ersten Test, zunächst als autonom fahrende 4WD Roboterplattform.
 Obwohl der Cherokey eine eigene Arduino Elektronik mit Motorsteuerung hat, habe ich ein extra Arduino Board mit Motorcontroller angebracht, da die Motorensteuerung auf meinem Cherokey nicht sauber funktioniert hat.
Obwohl der Cherokey eine eigene Arduino Elektronik mit Motorsteuerung hat, habe ich ein extra Arduino Board mit Motorcontroller angebracht, da die Motorensteuerung auf meinem Cherokey nicht sauber funktioniert hat.
Ein horizontal beweglicher Distanzsensor beobachtet die Umgebung (etwa 160 Grad) in bis zu 80cm Distanz und das Fahrzeug weicht autonom Hindernissen aus. Es ist nicht ferngesteuert. Ich werde die Hinderniserkennung später bei meinem ferngesteuerten TeleRobot mit aufnehmen um die Steuerung zu vereinfachen.
Ich finde den Cherokey als Testplattform recht gut. Insgesamt ist er für meine Ansprüche natürlich nicht leistungsfähig genug, ich brauche stärkere Motoren und eine größere Plattform für weitere Aufbauten.

SainSmart 4WD Plattform (nur mechanische Plattform, ca 40 EUR)

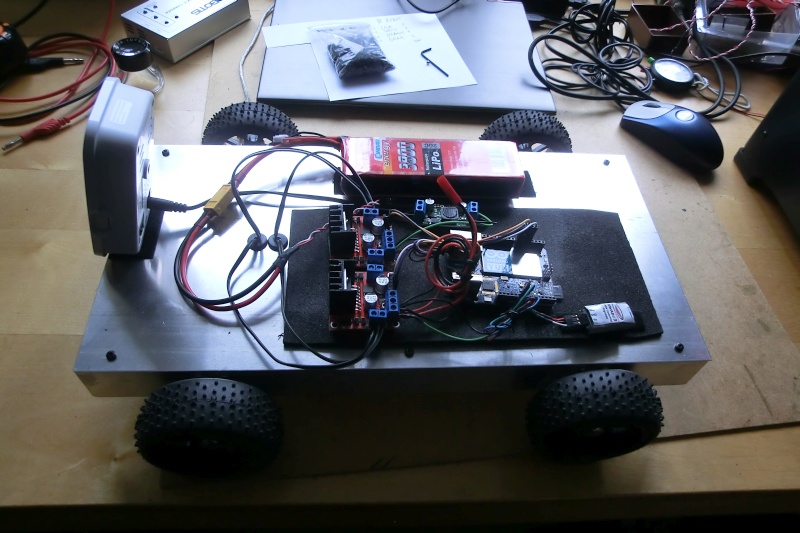
Diese Plattform ist im Gegensatz zum o.g. Cherokey recht ungenau gefertigt und nicht alle vier Räder berühren den Boden, also recht unbrauchbar. Ich habe die Räder später gegen diejenigen des Cherokeys getauscht, das war etwas besser. Die Elektronik ist in diesem Foto schnell mit einer Serviette gegen Kurzschluss geschützt und in die Plattform gelegt, hier mit Arduino YUN und IP Kamera, weil ich gleichzeitig die Internetsoftware entwickelt habe.

Die Plattform ist so schlecht, dass ich sie gleich wieder verworfen habe. Die Motoren sind zudem recht schwach. Künftig mache ich kleine Fahrzeugtests nur mit dem Cherokey, eventuell kaufe ich mir noch einen als Reserve.
Den Spykee (kam etwa 2011 raus von Meccano), den hatte ich bereits einige Jahre, zwei Stück, die meiste Zeit jedoch defekt. Er wurde zum Anlass für das TeleRobot Projekt.

Der Spykee wird nicht mehr hergestellt, galt eher als Spielzeug, war aber enorm leistungsfähig.
Die interessanten Details waren:
Steuerbar über LAN und über das Internet (Windows PC erforderlich oder kostenpflichtige App), Kamera, Mikrofon und Lautsprecher, Lichter.
Anfahrbare Ladestation mit automatischem Andocken.
Raupenketten Antrieb, sehr wendig. Zwei Geschwindigkeiten.
Das Problem bei meinen Spykees war, dass die Ladeelektronik nicht richtig funktionierte und trotz aller Versuche mit abschaltbaren Steckdosen und anderen Akkus
nach kurzer Zeit den jeweiligen Akku zerstörte. Das Neuaufladen einer Firmware “brickte” ein Motherboard. Ich habe es nicht reaktiviert, da ich die Lust verloren habe.
Den anderen Spykee habe ich mit einer anderen Firmware versehen, aber der Ladevorgang wurde hier auch nicht besser.
Seit 2016 geht die Internetweiterleitung nicht mehr, d.h. der Server wurde abgeschaltet und somit sind alle Spykees nur noch über LAN steuerbar.
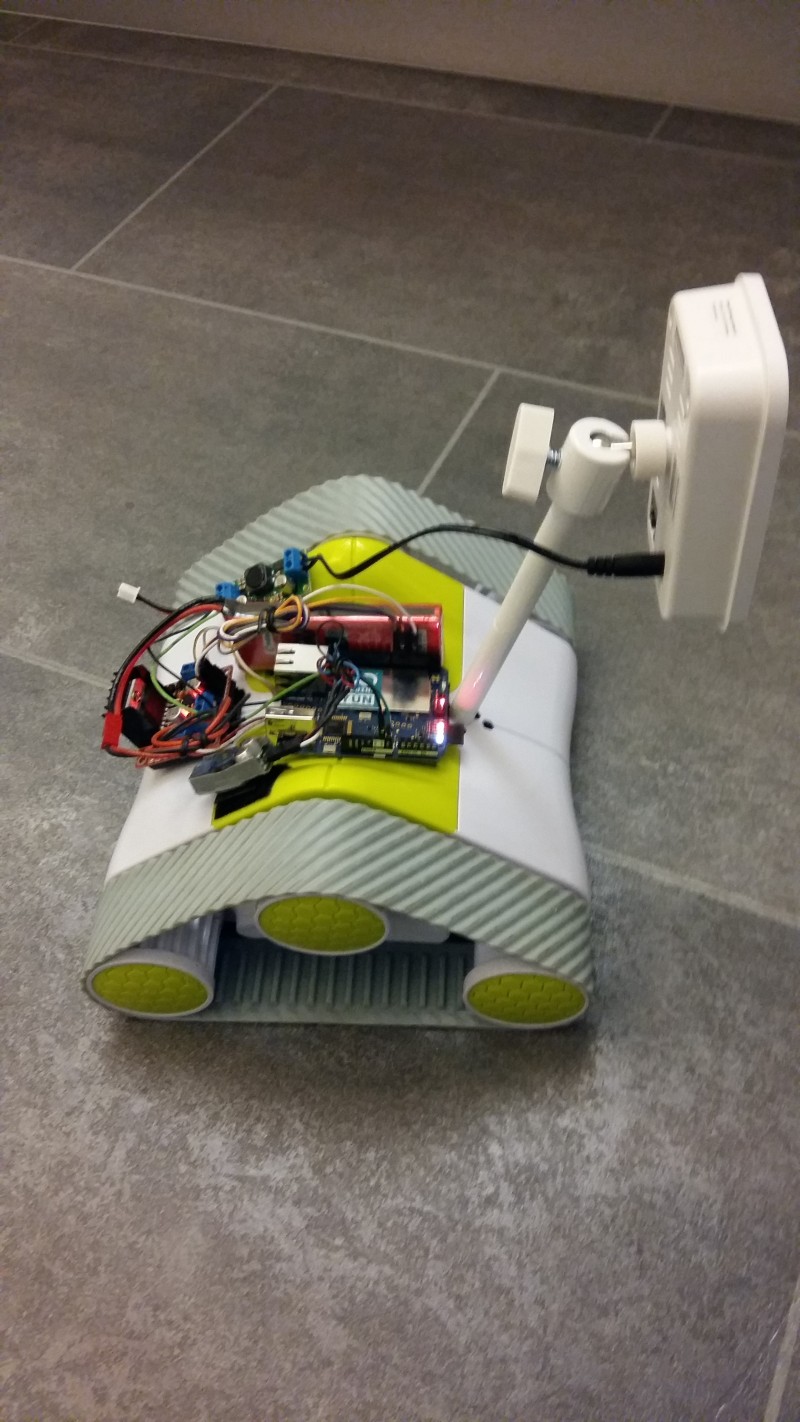
Also habe ich einen Spykee komplett entkernt, bis auf die beiden Motoren, das Gehäuse geschlossen, den Oberkörper demontiert und meine Elektronik angebracht.
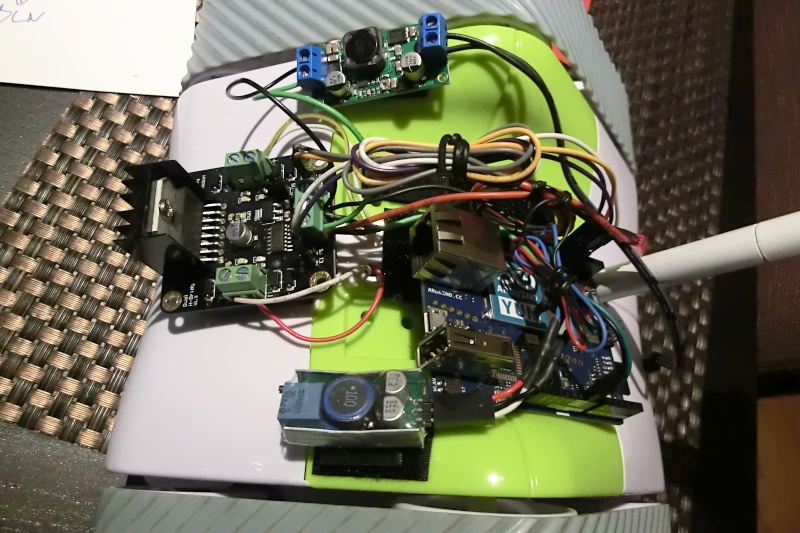
Hier mit Arduino YUN (rechts) (gutes Arduino Board mit WiFi, recht teuer 70 EUR), Motor Controller von DFRobot (links), zwei Spannungswandlern (unten für YUN, oben für Kamera) und einer IP Kamera (WiFi) mit Nachtsicht (an Stange rechts montiert) Das Ganze wird betrieben mit einem 7,4VDC LiPo Akku.
Der Versuch war ganz vielversprechend und hat mich ermutigt weitere Tests durchzuführen.
Die Plattform ist letztlich zu klein und die Motoren sind zu leistungsschwach. Zudem ist wegen der runden Ausformung oben eine Anbau von weiterer Mechanik umständlich. Aber irgendwie ist er putzig.
Carrera RC AUTO

Ich habe ein RC Auto gekauft (ca. 70 EUR) und alles abgebaut, bis auf Chassis und Motoren. Leider keine richtige Servolenkung, das zeigte sich später als Problem bei der Ansteuerung der Lenkung.
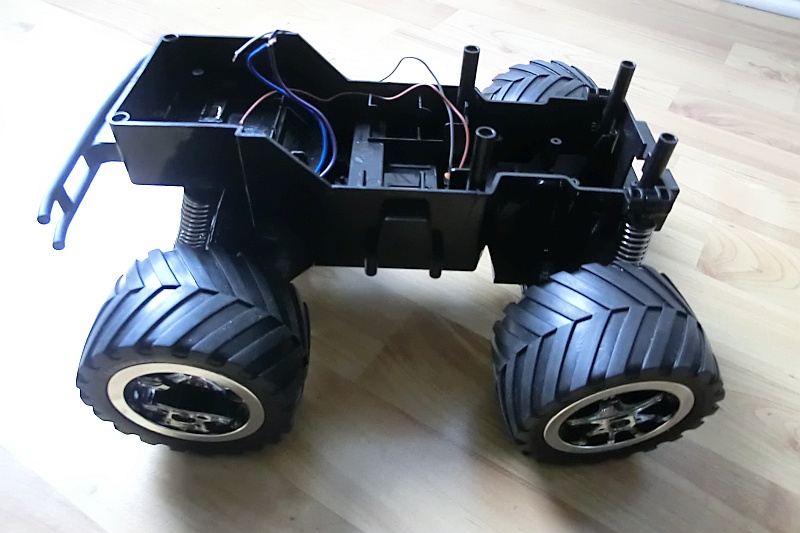
Zudem ist das Auto recht schnell und hat einen langen Nachlauf beim Wegnehmen der Geschwindigkeit. Das ist für Innenanwendungen nicht brauchbar. Also als Ergebnis: eigentlich eine günstige Plattform, dann aber besser mit Servolenkung und langsam, z.B. LKW oder Nutzfahrzeug. Starker Motor wäre auch nützlich. Für Innenanwendung ist aber 4WD oder Raupenkette immer besser, da wendiger und leichter fernzusteuern. Denkbar ist zudem 4WD oder 3WD mit omnidirektionalen Mecanum Reifen, oder theoretisch auch 2WD self balancing, aber verbraucht mehr Energie.
PEARL vertreibt einen kleinen Telerobot HSR-1 von 7Links, über App weltweit steuerbar, Raupenketten, neigbare Kamera, Beleuchtung, Ladestation, aber er ist weit überteuert (180 EUR) und zu klein für meine Zwecke.

Eigenbau TeleRobot 4WD
Aus den nun gesammelten Erfahrungen habe ich mir eine erste kleine vierradgetriebene Plattform gebaut. Die 12VDC Motoren sind stark genug, nicht zu schnell (60rpm max), die Reifen sind leicht nach hinten versetzt, sodass sie bei Kollision nicht am Hindernis hochrollen und die Plattform umkippt, die Aufbaufläche ist groß für jede Menge Aufbauten und Tests.
Hier sind zwei Dual Motorcontroller verbaut, das ist zwar noch nicht notwendig, aber evtl. bringt das mehr Kraft für später. Auf hohem Teppich dreht er langsam, aber es geht.
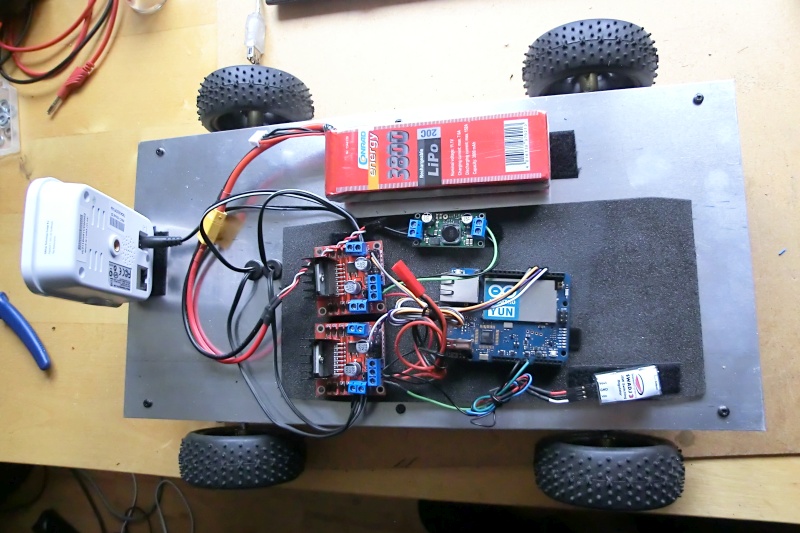
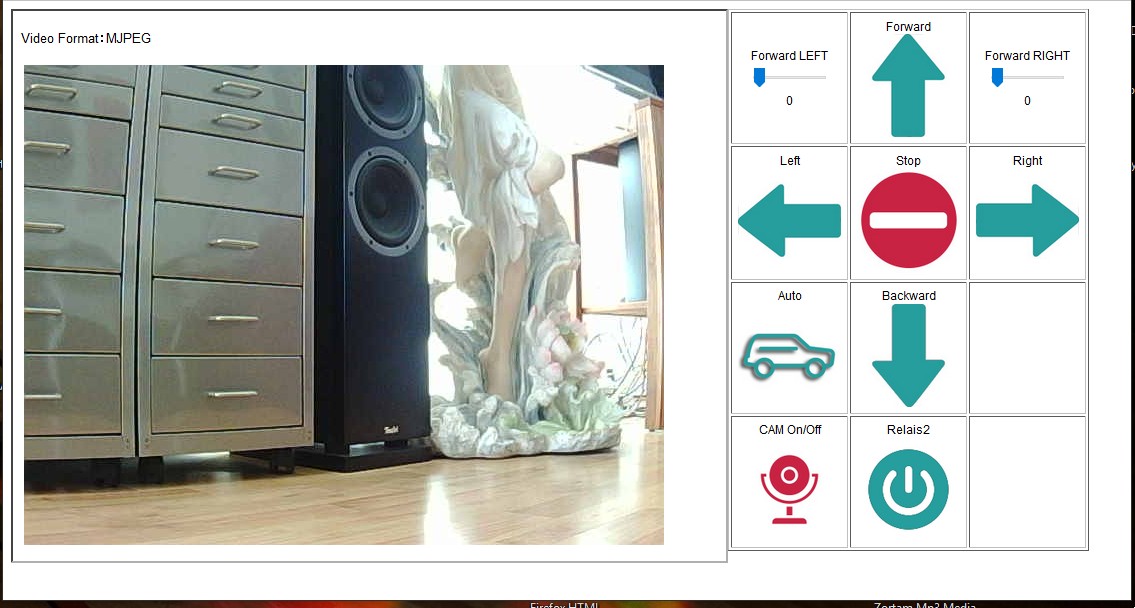
Software: Eine Webseite ist auf die SD Karte vom YUN aufgespielt. Der YUN hat eine feste lokale IP Adresse und ebenso die IP Kamera, beide funken zum Router.
Um über Internet steuerbar zu sein: Beide Adressen werden auf no-ip.com (kostenfrei bis 3 Weiterleitungen) eingetragen, bei der Kamera mit Portfreigabe im Router und Portweiterleitung bei no-ip.com. Die Webseite integriert das Kamerabild als iframe.
Der 3800 mAH LiPo Akku mit 11,1VDC hält vermutlich zwischen 45-60 min, werde ich mit Dauerlast noch testen. Eine Auflademöglichkeit im Fahrzeug (Ladestation) gibt es noch nicht.
Hier ist nun die erweiterte Version des Eigenbau-RoboCars:

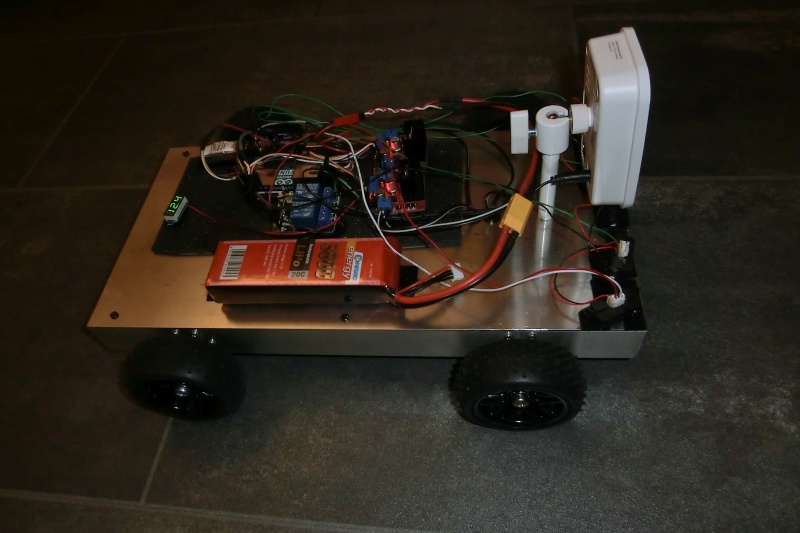

Die Änderungen auf der Hardware Seite:
ein Relaisboard mit zwei Relais, eines davon ist nun zum Fern-Ein/Ausschalten der Kamera durch komplette Kappung der Stromzufuhr
der Wegfall des Spannungswandlers 12VDC für die Kamera, die Kamera wird nun testweise direkt vom Akku betrieben, getestet mit Spannungen zwischen 12,4VDC (voll geladen) bis runter zu 11,3VDC
eine LED Anzeige der derzeitigen Spannung des Akkus
5 Infrarotsensoren (ca 10-80cm Reichweite) am Fahrzeugbug zur Hinderniserkennung
Kamera nach hinten und etwas höher versetzt
Die Änderungen auf der Software Seite:
Kamera ein/aus
Autonomes Fahren ein/aus: Die fünf Sensoren werden ausgewertet und nun Hindernissen automatisch ausgewichen, dabei werden die Ausweichbewegungen mit Zufallswerten angereichert um endloses Pendeln zwischen Hindernissen zu vermeiden. Es kann nun nahtlos von Fernsteuermodus auf autonomen Modus und zurück gewechselt werden, was die Fernsteuerungtätigkeit deutlich erleichtert.
TODO: nach wie vor ist das automatische Aufladen nicht gelöst. Und das Fahrzeug braucht einen Bumper-Sensor, im Idealfall auf allen Seiten, für den Fall, dass er einem Objekt zu nahe kommt.